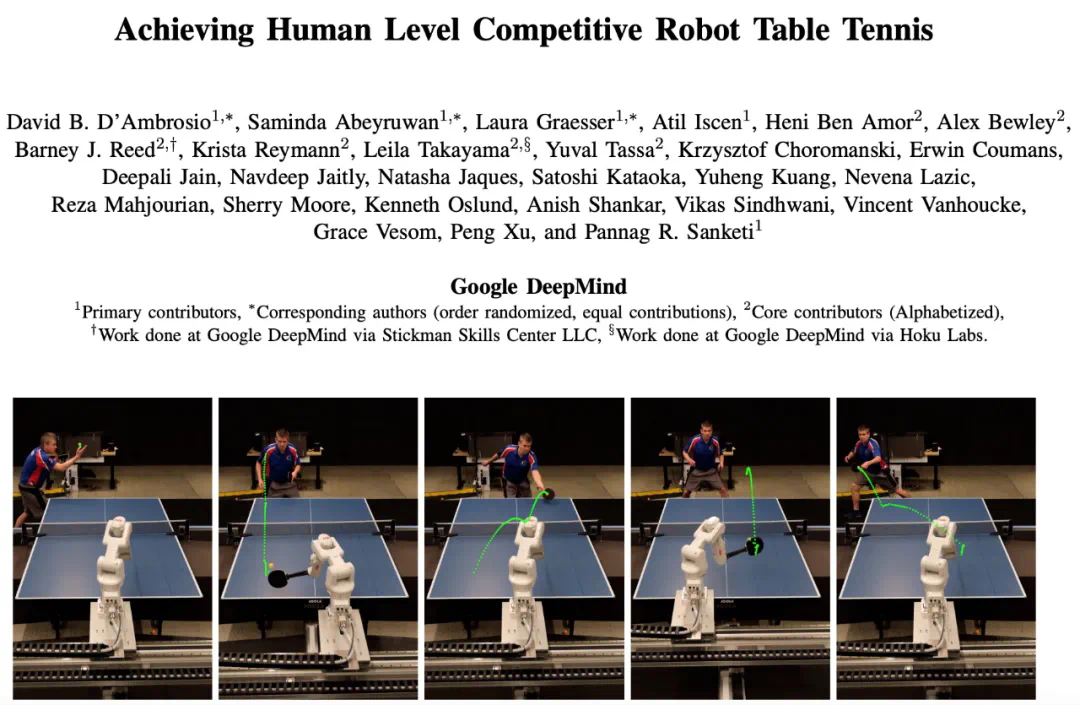
谷歌DeepMind的一個工程師團隊開發了一款可以打業餘桌球的機器人。該機器人的核心硬體基於ABB IRB 1100機械臂,以高速、高精度而聞名,廣泛應用於工業場景。通過將先進的機器人技術和人工智慧相結合,可以進行快速且有策略的桌球動作。
通過觀看物理模擬和人體比賽、使用小規模數據集進行訓練,並通過疊代過程不斷提高技能。該機器人在面對不同級別的人類玩家時輕鬆擊敗了初學者,並在對陣中級玩家的比賽中贏得了一半以上的比賽,但在對陣高級玩家的比賽中表現不佳。
不過,競爭似乎沒有公園裡的老人那麼激烈。
對於機器人來說,桌球需要掌握複雜的低級技能和策略性玩法,需要長期訓練。DeepMind認為,擁有更好的策略,但熟練執行低級技能可能是更好的選擇。這將桌球與西洋棋和圍棋等純粹的戰略遊戲區分開來。
因此,桌球是提高機器人能力的寶貴基準,包括高速運動、實時準確和戰略決策、系統設計以及與人類對手的直接競爭。
對此,谷歌DeepMind首席科學家稱讚道:「桌球機器人將幫助我們解決高速控制和傳感問題。"
如果您想了解更多信息,可以單擊視頻下方的連結。
感謝您觀看此視頻。如果您喜歡,請訂閱並點讚。謝謝
論文地址:https://arxiv.org/pdf/2408.03906
輸油管: