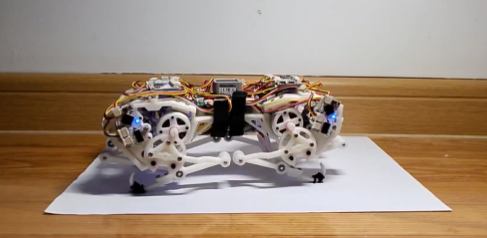
This is a low-cost, 8-degree-of-freedom (8DOF) controllable torque open-source quadruped robot project.
The project includes hardware CAD design, electronic drivers and main control boards, V-rep simulation, kinematics and dynamics, and firmware.
It’s very interesting, you can play if you are interested! 😃
GitHub:https://github.com/psrobotics/quadruped_bai_tiny